🔴 Cabeza robótica | Microbit
- 5 mar
- 2 min de lectura
Actualizado: 29 abr

Hola, profes. ¿Cómo va todo por ahí?
El día de hoy les quería compartir uno de mis hallazgos de las últimas semanas: El sitio web de "Cardboard Robots" (robots de cartón). Lugar donde aprendí a hacer el robotito que verán en este post.
La actividad se puede hacer con Microbit, Arduino o Calliope Mini.
Yo, personalmente, elegí Microbit dado que tengo la placa de expansión que me permite colocar servos; además de que en escuela primaria (sector en donde más trabajo) solemos utilizar mayoritariamente Microbit.
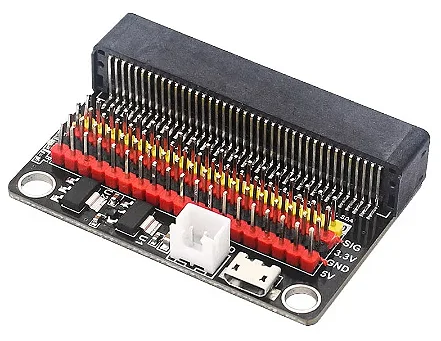
Placa de expansión para Microbit
De todas formas, aquí dejo el link general para los tres tipos de placa:
Bien... ¿Qué es lo que necesitaremos para trabajar?
Cartón 📦
Regla 📏
Tijera ✂️
Destornillador 🪛
Tuercas y tornillos 🔩 (con un tornillo de 25 mm, 1 tuerca y 2 arandelas alcanza)
2 clip de papel de 32 mm (yo usé 4. 2 de ellos sólo para hacer peso en el cuello)
1 BBC Microbit.
1 placa de expansión para Microbit.
2 micro-servos de 180° grados.
Cables de puente (generalmente, ya vienen en el servo).
PARTE 1 - Construcción de la cabeza:
» Notas personales: El único tornillo indispensable es el de la mandíbula, dado que las otras uniones se pueden pegar con pegamento común.
Por otra parte, podrás notar que el servo que se usa en el video tiene como unos mini-tornillitos que se inscrustran en el cartón, agarrando la cabeza.
Si tu servo no tiene estos mini-tornillitos, podés pasar un alambrecito por los agujeritos de la "hélice" de tu servo y así poder agarrarlo al cartón 👍.

PARTE 2 - Construcción del cuello:
» Notas personales: Las uniones se pueden pegar fácilmente con pegamento. No hace falta usar tornillos, a menos que quieras hacerlo por una cuestión estética.
El servo utilizado en el video para hacer rotar el cuello del robot posee varios tornillos en su "hélice" que permiten agarrar la cabeza desde abajo con facilidad.
Si tu servo no tiene esto, podés pegar el plástico de la hélice al cartón con algún tipo de pegamiento fuerte (cuidado con dañar otras partes del servo).
PARTE 3 - Código:
Link ACÁ
(Botón de "Edit Code" disponible)
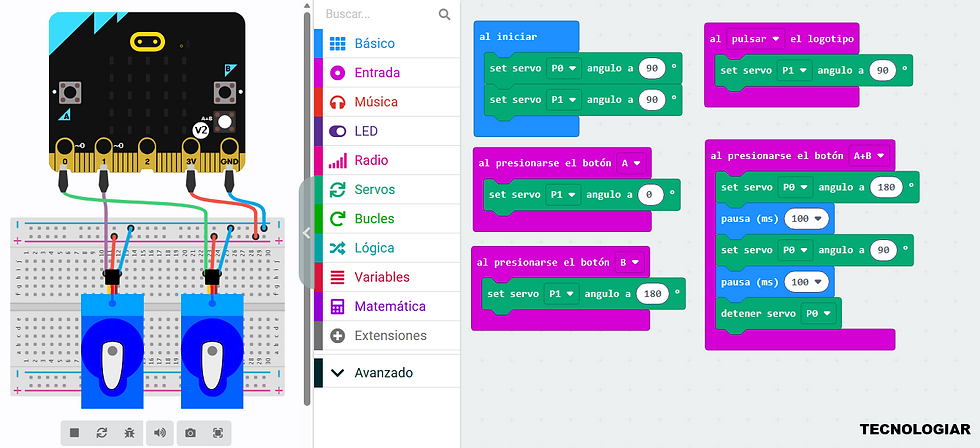
» Notas personales: Este código hace funcionar al robot tal cual se muestra en el primer video de esta publicación.
Al iniciar, se colocan los servos en su posición inicial (90 grados). Pin 0 -> Cabeza | Pin 1 -> Cuello.
Al presionarse el botón "A", el cuello (servo P1) se mueve hacia la derecha; quedando a 180 grados.
Al presionarse el botón "B", el cuello (servo P1) se mueve hacia la izquierda; quedando el servo a 0 grados.
Al pulsarse el logotipo, el cuello (servo P1) vuelve al medio; quedando a 90 grados.
Al presionarse A+B (ambos botones a la vez); el servo P0 (mandíbula) se abre a 180 grados y vuelve a cerrarse a 90 grados luego de una pausa. Finalmente, se detiene.
Por último, algunas joyitas del proceso:

De corazón, profes, espero que les haya gustado esta actividad.
Les mando un gran abrazo y muchísima suerte.
Estamos en contacto 🧉🤙.
~ Marcos.
